
Für minimalinvasive Operationen (MIS minimally invasive surgeries) müssen Geräte klein sein. ETH-Forscher haben nun eine Methode entwickelt, um grosse Geräte durch einen engen Katheter zu transportieren. Das erweitert die Möglichkeiten, minimalinvasive Operationsgeräte zu konstruieren.
Ein Kamel geht nicht durch ein Nadelöhr. Doch Forscher der ETH Zürich haben nun etwas erreicht, das dem – bildlich gesprochen – recht nahe kommt. Sie entwickelten einen neuen Ansatz für minimalinvasive Operationsgeräte, dank welchem grosse Objekte durch einen engen Katheter in den Körper gebracht werden können.
Das funktioniert folgendermassen: Die Forscher zerlegen solche Geräte in einzelne Teile und schieben sie dann wie auf einer Perlenkette aufgereiht durch den Katheter. Am Katheterende setzen sich die Teile dank eingebauten Magneten zu einer vordefinierten Form von allein zusammen.
In der Forschung des Teams um den ETH-Doktoranden Hongri Gu, der heute als Postdoc an der Universität Konstanz tätig ist, ging es primär darum, die vielfältigen Möglichkeiten des neuen Ansatzes aufzuzeigen. Auf verhältnismässig einfache Weise und mittels 3D-Druck konstruierten die Wissenschaftler auch einen Endoskop-Greifarm. Ausserdem zeigten sie, dass es mit dem neuen Ansatz möglich ist, einen aus drei Teilen bestehenden Endoskop-Kopf zusammenzusetzen. Die Forscher kombinierten für ihre Geräte-Prototypen weiche, elastische Materialien (z. B. Polymere mit Formgedächtnis, stimulierend reagierende Hydrogele) mit starren Segmenten, in welche die winzigen Magnete eingearbeitet sind. Diese Konstruktionsweise ermöglicht es auch, mit einem Endoskop-Kopf Bewegungen mit sehr engen Radien und Winkeln zu vollführen, wie es mit heutigen Endoskopen nicht möglich ist. Diese erhöhte Beweglichkeit erweitert die Möglichkeiten bei der Konstruktion von Geräten für die minimalinvasive Chirurgie bei Organen wie dem Darm oder dem Magen.
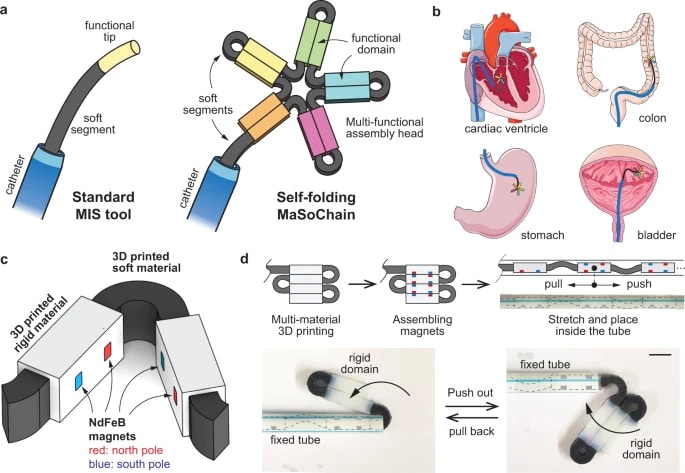
Konzept und Struktur von magnetischen weich-robotischen Ketten (magnetic soft- robotic chains, MaSoChains)
Die Grafik zeigt schematisch auf, wie das Ganze funktioniert. a Darstellung eines Standard-MIS (minimalinvasive Operation)-Werkzeugs und einer sich selbst faltenden MaSoChain. Die MaSoChains können sich an der Katheterspitze selbst zu grossen Einheiten mit mehreren Funktionsbereichen zusammenfalten. b Mögliche Anwendungsszenarien für MaSoChains. Wenn sie aus dem Hüllkatheter (blau markiert) herausgeschoben werden, können sich MaSoChains in relativ offenen Kammern des menschlichen Körpers (z. B. Herzkammern, Dickdarm, Magen, Blase) zu grossen funktionellen Strukturen (farbiger Stern) falten. c Die grundlegende selbstfaltende Einheit von MaSoChains, bestehend aus starren Segmenten (weiss), die durch weiche Segmente (schwarz) verbunden sind. Kleine NdFeB-Magnete sind auf der gleichen Höhe wie die umgebende Oberfläche eingebettet. d (oben) Eine schematische Darstellung der Vorbereitung der MaSoChains. Nach dem Zusammenbau der kleinen Magnete werden die MaSoChains gestreckt und im Inneren des Hüllrohrs platziert, wo elastische und magnetische Energien gespeichert werden. (unten) Der Faltvorgang der MaSoChain wird eingeleitet, wenn ein neues Segment aus dem Hüllrohr herausgeschoben wird. Die elastische Energie (die in dem weichen Segment gespeichert ist) faltet die MaSoChain, und die magnetische Energie sorgt für eine stabile Anordnung (markiert als der starre Bereich). Die MaSoChain wird durch Zurückziehen und Führen des festen Rohrs demontiert. Der Massstab ist 5 mm.
Die Wissenschaftler veröffentlichten ihre Demonstrationsstudie in der Fachzeitschrift Nature Communications https://www.nature.com/articles/s41467-023-36819-z
Literaturhinweis
Gu H, Möckli M, Ehmke C, Kim M, Wieland M, Moser S, Bechinger C, Boehler Q, Nelson BJ: Self-folding soft-robotic chains with reconfigurable shapes and functionalities. Nature Communications, 7. März 2023
Kontakt
ETH Zürich
Fabio Bergamin, Hochschulkommunikation
fabio.bergamin@hk.ethz.ch
CH-8092 Zürich
www.ethz.ch